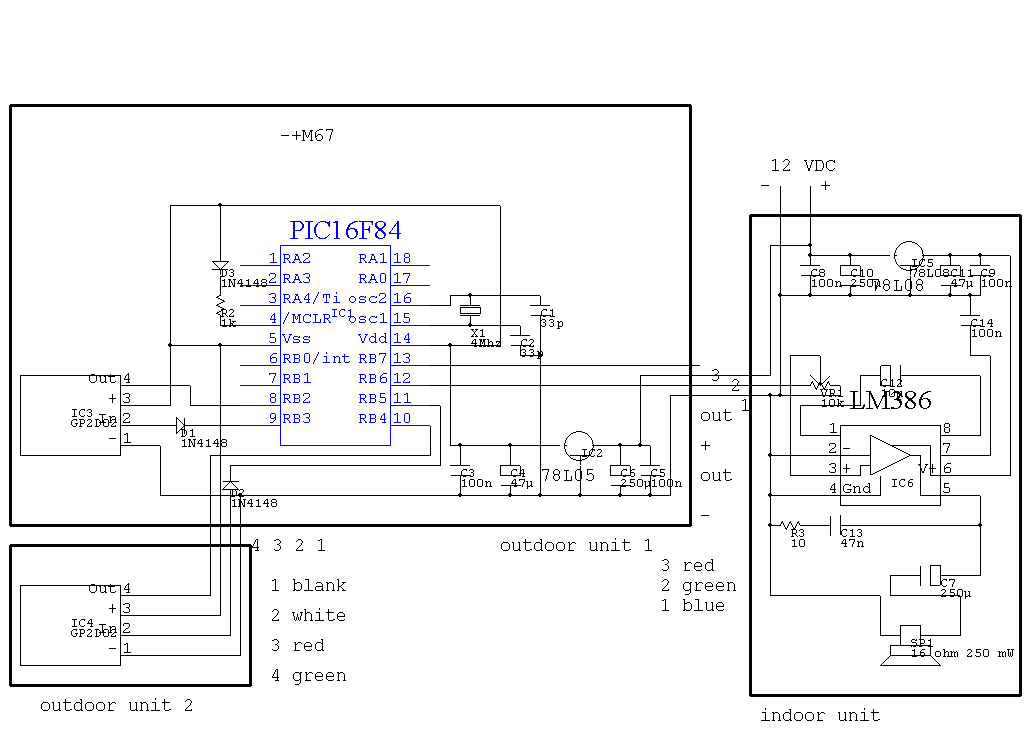
Deze schakeling is gebaseerd op de PIC 16F84 microcontroller. Deze chip is eigenlijk een kleine computer
die in één enkele chip bevat is, inclusief RAM geheugen, EEPROM, I/O poorten, centrale verwerkingseenheid enz. Als je
deze chip koopt, is hij uiteraard leeg en bevat geen enkel programma. Je moet de broncode (zie link onderaan) compileren
en de resulterende machinecode naar de chip downloaden. Hierbij kun je gebruik maken van een kleine "programmer" die
verbonden wordt tussen de parallelle poort van de PC en de chip. Voor meer in detail uitleg van dit soort dingen, kun je
best eens naar volgende plaats surfen:
Getting started with microcontrollers.
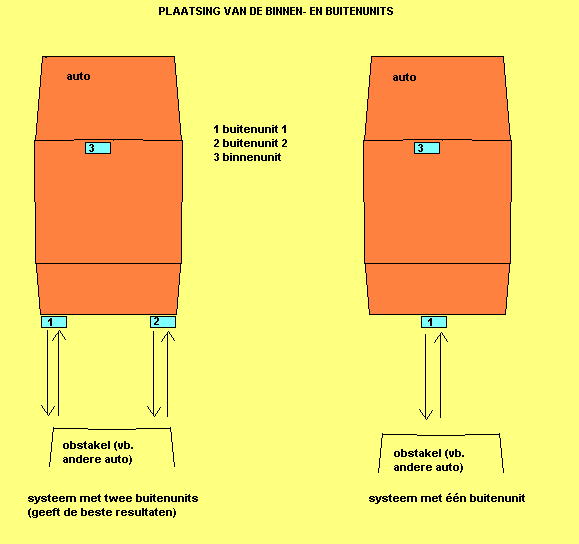
Deze schakeling is een parkeerhulp, dit wil zeggen een apparaat om bij het achteruit in te parkeren hulp te krijgen
in de vorm van een geluidsignaal dat aangeeft hoe dicht je de andere auto nadert. Twee infrarood afstandssensoren (of
tenminste een) berekenen constant de afstand tussen de achterbumper en de andere auto. De bestuurder hoort dit via een
luidspreker. Er zijn zes niveaus: het eerste niveau (start niveau) laat korte lage tonen horen met lange pauzes om aan
te duiden dat er een obstakel is verder weg dan ong. 1m40. Het tweede niveau laat lange lage tonen horen zodra je
tussen 1m en 1m40 verwijderd bent van het obstakel. Het derde, vierde en vijfde niveau klinken steeds hoger in
toon (en kortere beepjes) wanneer je het andere voertuig resp. minder dan 1m, 75 cm en 50 cm nadert. Als je dichter
bent dan 25 cm, ben je in niveau 6 waar er snelle tweetonige beepjes te horen zijn, om aan te duiden dat je bijna tegen
het andere voertuig botst.
Als er geen obstakel is, is er ook geen geluid behalve een soort zacht getik om aan te duiden dat de processor loopt.
Bij het inschakelen (bij voorkeur met een schakelaar of via de achteruitrijlichten) is eenmalig een dubbele toon te
horen die aanduidt dat het apparaat ingeschakeld is en werkt.
De schakeling maakt gebruik van de Sharp IR afstands sensor GP2D02. Deze sensor is gebaseerd op driehoeksmeting, en is
ontworpen om afstanden tussen 10 cm en 80 cm te meten, maar met behulp van wat slimme software is het mogelijk
gebleken om in de praktijk tot meer dan 140 cm te gaan.
Als je slechts 1 sensor wil gebruiken, moet je de lijn '#define TWO_SENSORS' vervangen door '#define ONE_SENSOR" in
de bron-code. Anders zal de software blijven hangen omdat hij de tweede sensor niet kan vinden.
Het volledige apparaat bestaat uit 3 units: 2 buiten-units (waarvan 1 de microprocessor, voeding, eerste sensor en wat
andere componenten bevat, de tweede bevat alleen de tweede sensor) en een binnen-unit, dewelke eigenlijk een
doodgewone audio-versterker is met bijbehorende luidspreker en voeding.
Er zijn slechts 3 draden nodig om de buiten-unit (achteraan de auto) met de binnen-unit te verbinden (binnenin de
auto). Als je twee sensoren gebruikt, zijn er 4 draden nodig om deze tweede sensor met de eerste te verbinden.
Bij gebruik van twee sensoren, zal de software steeds de hoogste van de twee teruggeven waarde nemen voor conversie
naar geluid (dit is de kortste afstand).
In de bron-code zit ook aansturing van een LCD-display. Dit is alleen nodig als je deze software draait op het
'LCD Experimenteerbord met PIC16F84' circuit elders op deze site, dus niet voor deze schakeling. In dit geval
wordt de uitgangswaarde van de sensor (of de hoogste uitgangswaarde van twee sensoren) continue getoon op het LCD
display.
Meer informatie over de Sharp IR afstands sensor GP2D02 kun je hier vinden:
Sharp IR GP2D02 sensor.
De twee (of een) buiten-units moeten helemaal waterdicht worden gebouwd. Ik gebruik hiervoor een plastic kastje met
uitgezaagd vierkant, dat met glas wordt afgedekt. De sensor komt dan achter het glas. De beste resultaten worden
verkregen wanneer de sensoren verticaal worden gemonteerd, met de licht emitterende diode aan de bovenkant. Het is
aan te raden om afgeschermde kabel te gebruiken tussen de twee buiten-units niet langer dan 1.4 meter.
Uit ervaring is gebleken dat wanneer je een stuk zilverpapier rond de sensor wikkelt en dit met de massa verbindt, veel
betere resultaten verkregen kunnen worden. Als de sensor naar de open lucht gericht wordt, zou je een waarde van 1
verwachten (laagste waarde - grootste afstand). In werkelijkheid, zonder het zilverpapier, varieert de output dan tussen
1 en ongeveer 40. Als je het zilverpapier dus gebruikt (dit werkt als afscherming), kan de software dus reeds beginnen
met meten bij een veel lagere waarde, wat resulteert in een groter bereik.